Execution Graphs vs. Supervisor Hierarchies: A Tradeoff Analysis of Agent Orchestration Architectures
A deep-dive comparison of the two dominant paradigms for orchestrating multi-agent systems in production — state-machine graphs and supervisor hierarchies — with decision criteria backed by empirical evidence.
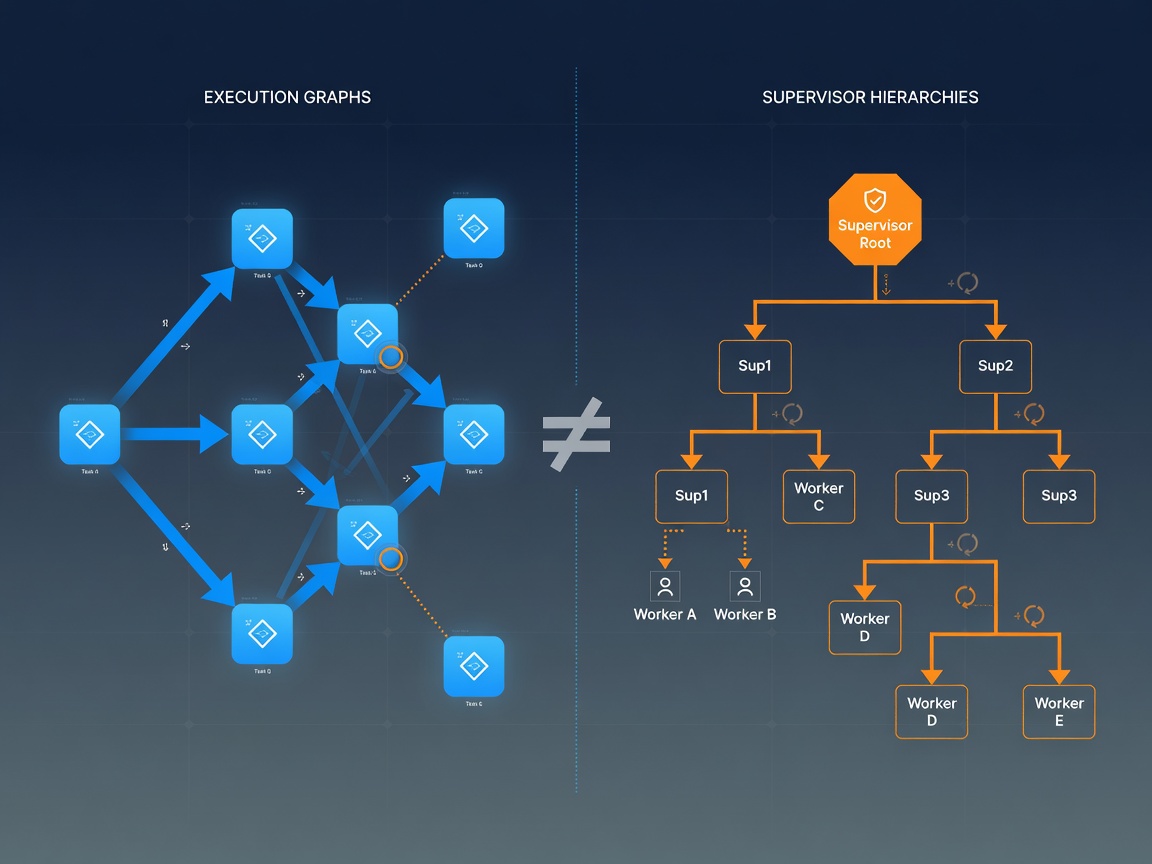
Every production multi-agent system eventually faces the same architectural fork: do you model agent coordination as an execution graph (directed state transitions between specialized nodes) or as a supervisor hierarchy (a manager agent that delegates to workers)? This choice determines everything about your system’s debuggability, fault tolerance, latency profile, and scalability ceiling.
By mid-2026, the agent framework landscape has largely converged on two poles: LangGraph’s state-graph model (backed by a mature runtime with durable execution, checkpointing, and human-in-the-loop primitives) and supervisor-based architectures popularized by OpenAI’s Swarm and adopted by frameworks like CrewAI, AutoGen, and Mastra [1][2]. The question is no longer which framework is better but which architectural pattern maps to your operational constraints.
The Execution Graph Model
LangGraph, Google ADK, and Stately Agent have all converged on state-graph primitives as their core abstraction [3]. An execution graph represents agent workflows as a directed graph where nodes are computation steps (LLM calls, tool executions, sub-agent invocations) and edges are conditional transitions gated on the output of the previous node. The graph is itself a state machine — each node reads from and writes to a shared state object that persists across the entire workflow execution.
The key property is deterministic replay: because every transition is recorded and the state is checkpointed at each node boundary, you can re-execute any subgraph from any checkpoint. This makes execution graphs fundamentally debuggable in a way that supervisor hierarchies are not. The LangChain team’s 2026 runtime for deep agents exposes checkpoint IDs, human-in-the-loop intercepts at any node, and a branching model that lets engineers fork execution mid-stream — capabilities that are functionally impossible in a supervisor architecture without reimplementing the graph layer yourself [4].
The cost is complexity. Teams adopting LangGraph “need to think in state machines, async graph execution, and explicit control flow” [2]. The cognitive load is real — every edge condition must be explicitly defined, every shared state mutation must be intentional, and the graph topology is fixed at compile time (or at least before execution begins). For workflows with fewer than five steps or fewer than three agents, the graph model is almost certainly over-engineering.
The Supervisor Hierarchy Model
Supervisor architectures invert the control flow. A single orchestrating agent (the supervisor) receives a task, decomposes it, delegates sub-tasks to worker agents, and aggregates their results. The supervisor makes routing decisions at runtime based on natural language reasoning rather than pre-defined edge conditions. CrewAI, AutoGen, and Mastra all implement variations of this pattern [5][6].
The immediate advantage is dynamic flexibility: the supervisor can invent sub-tasks, re-prioritize work, and handle unexpected intermediate results without any pre-declared graph structure. For open-ended tasks like research synthesis, customer support triage, or creative brainstorming — where the flow cannot be anticipated at design time — this is not just convenient, it’s necessary.
The cost is non-determinism and opacity. When a supervisor agent decides to delegate to Worker A instead of Worker B, the decision is embedded in an opaque LLM call. You cannot replay the decision tree without re-running the entire workflow, and the supervisor’s reasoning may change between runs even with the same input. Production teams report that supervisor-based systems are significantly harder to debug in staging because “the supervisor’s routing logic is conversational rather than computational” [7]. The 2026 PerspectiveGap benchmark found that supervisor architectures produced significantly wider variance in output quality across identical inputs compared to graph-based systems — a finding that strongly suggests non-determinism is not just an operational inconvenience but a quality risk [8].
When Each Pattern Wins
The empirical evidence from production deployments in 2025-2026 suggests clear decision boundaries.
Choose execution graphs when:
- Your workflow has a known topology (even if complex) with well-defined branch points
- Deterministic replay is required for audit, compliance, or debugging
- You need human-in-the-loop at specific decision points
- The workflow involves more than 3-5 steps where shared state is referenced across steps
- You are operating under SLOs that require predictable latency per step
LangGraph deployments at enterprises handling compliance workflows (healthcare prior authorization, financial KYC, legal contract review) uniformly use execution graphs because the audit trail requirement alone rules out supervisor-based approaches [4][9].
Choose supervisor hierarchies when:
- The task structure is unknown at design time and discovered at runtime
- You value rapid prototyping and conversational flexibility over reproducibility
- The number of possible execution paths is unbounded or combinatorially large
- Human-in-the-loop is handled at the supervisor level (approve final output) rather than at individual step boundaries
- The team’s experience is in prompt engineering rather than systems programming
CrewAI deployments in content generation, research synthesis, and open-ended analysis tasks overwhelmingly prefer supervisor hierarchies because the value of dynamic task decomposition outweighs the reproducibility cost [5][6].
Hybrid Architectures: The Production Default
The most interesting development in 2026 is the emergence of hybrid architectures that nest both patterns. A common production pattern uses a top-level graph with supervisor nodes as sub-graph elements. The supervisor handles open-ended sub-tasks (research, analysis, creative generation), while the graph handles deterministic orchestration (parallel fan-out, conditional routing, state aggregation, human-in-the-loop gating). Zylos Research documents this as the “layered state-graph” pattern, and it is now the default recommendation for systems with more than five agents [3][9].
Confluent’s event-driven multi-agent architecture paper demonstrates that hybrid patterns also emerge naturally when you separate coordination (event streams, actor mailboxes) from execution (LLM calls, tool runs) — the coordination layer is graph-like and deterministic, while individual execution nodes are supervisor-like and flexible [10].
The practical takeaway: do not treat this as an either/or decision. A well-designed agent architecture has a graph skeleton for coordination and supervisor nodes for flexible computation. The frameworks that survive in production are the ones that make this nesting natural — LangGraph’s sub-graph support, Mastra’s workflow primitives, and Anthropic’s dynamic workflows feature all enable this pattern explicitly [11].
Decision Framework
Based on production evidence across several multi-agent deployments documented in the 2026 literature, here is a structured decision process:
- Map your workflow topology. If you can draw a state diagram with fewer than 20 edges, start with an execution graph. If you cannot draw the edges because they depend on LLM output, start with a supervisor.
- Identify your audit requirements. Any compliance or financial use case mandates graph-based execution with checkpointed state.
- Measure your acceptable latency variance. Supervisor architectures have high P99/P50 latency ratios because the supervisor’s reasoning time varies with input complexity. Graphs have stable per-node latency.
- Design the nesting boundary. Identify which sub-tasks are open-ended (supervisor inside graph) and which are deterministic (graph nodes).
The 2026 version of this analysis will likely look different — agent frameworks are converging rapidly. But the architectural tradeoffs documented here are grounded in invariants of the underlying compute model. Graphs give you determinism and debuggability. Supervisors give you flexibility and dynamism. Production systems need both, and the engineering challenge is designing the boundary between them.
References
[1] LangChain Blog, “Choosing the Right Multi-Agent Architecture,” January 2026. https://www.langchain.com/blog/choosing-the-right-multi-agent-architecture
[2] Truefoundry, “Best Multi-agent Orchestration Frameworks in 2026,” June 2026. https://www.truefoundry.com/blog/multi-agent-orchestration-frameworks
[3] Zylos Research, “Finite State Machines and Statecharts for AI Agent Orchestration,” April 2026. https://zylos.ai/research/2026-04-02-finite-state-machines-statecharts-ai-agent-orchestration/
[4] LangChain Blog, “The Runtime Behind Production Deep Agents,” April 2026. https://www.langchain.com/blog/runtime-behind-production-deep-agents
[5] LushBinary, “Multi-Agent AI Orchestration Patterns: Production Guide,” May 2026. https://lushbinary.com/blog/multi-agent-orchestration-patterns-supervisor-swarm-pipeline-router-guide/
[6] Paiteq, “Multi-agent system orchestration patterns,” 2026. https://www.paiteq.com/blog/multi-agent-orchestration-patterns/
[7] Zylos Research, “Graph-Based Agent Workflow Orchestration in Production: The 2026 Landscape,” April 2026. https://zylos.ai/research/2026-04-14-graph-based-agent-workflow-orchestration-production/
[8] “PerspectiveGap: A Benchmark for Multi-Agent Orchestration Prompting,” arXiv 2606.08878, June 2026. https://arxiv.org/html/2606.08878v1
[9] Zylos Research, “Agent Workflow Orchestration Patterns: DAG, Event-Driven, and Actor,” April 2026. https://zylos.ai/research/2026-04-14-agent-workflow-orchestration-patterns/
[10] Confluent Blog, “Four Design Patterns for Event-Driven, Multi-Agent Systems,” February 2025. https://www.confluent.io/blog/event-driven-multi-agent-systems/
[11] Presenc AI Research, “Multi-Agent Orchestration Frameworks 2026,” 2026. https://presenc.ai/research/multi-agent-orchestration-frameworks-2026